Главными "поставщиками" ошибок хода часто являются погрешности в зубчатых передачах часового механизма. Проиллюстрировать это утверждение можно на таком примере. Построенный автором телескоп имеет фокусное расстояние 2200 мм и для безукоризненной работы в режиме астрографа (при съемке в прямом фокусе) должен выдерживать заданное направление на звезду в пределах 2-3 угловых секунд. Несложный расчет показывает, что при этом зубчатое зацепление червяка с червячным колесом должно работать с точностью 0.6-0.9 микрона. Эта малая величина относится к паре "червяк-колесо", а это значит, что при изготовлении каждой из названных деталей необходимо уложиться в допуски еще, по крайней мере, в два раза более жесткие! Доступными технологиями гарантированно выдержать такую высочайшую точность невозможно — реальная металлообработка имеет дело все-таки с более грубыми допусками.
Эта проблема хорошо известна, и традиционно остроту ее снижают, сильно увеличивая диаметр зубчатого колеса с одновременным уменьшением размера (модуля) зубьев. Но эти меры не всегда приемлемы: большое, тяжелое и дорогое червячное колесо не подойдет, например, переносному телескопу.
А можно ли, не располагая сверхвысокой точностью в кинематике портативной монтировки, существенно повысить стабильность угловой скорости и освободить астронома от необходимости часто корректировать ход привода во время экспозиции?
Для поиска вариантов решения этой проблемы автором вначале было проведено небольшое исследование точности работы часового привода своего телескопа. Результат виден на графике, где наглядно показана ошибка в скорости следования за звездой (вдоль суточной параллели) в течение 20 минут работы электропривода. Погрешность проявляется в том, что в отдельные моменты телескоп "отстает" от звезды (нижняя часть синусоиды), а потом "обгоняет" ее. Иначе говоря, телескоп отслеживает звезду, как бы "покачиваясь". Средняя же скорость остается примерно постоянной.
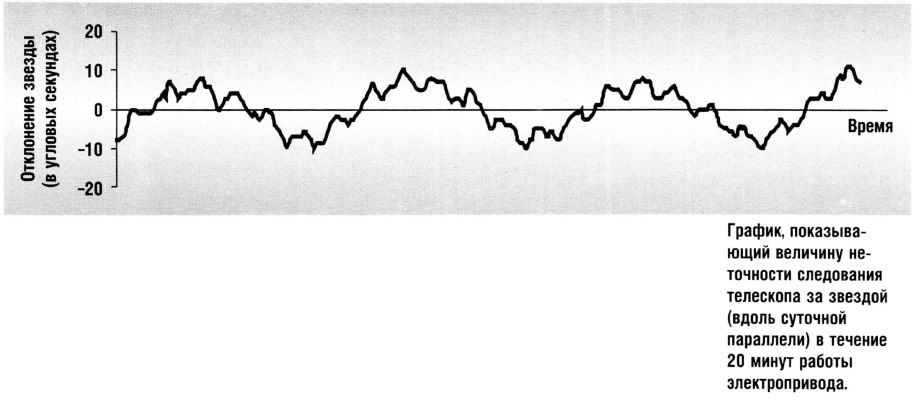
График позволил сделать важный вывод: основные ошибки в угловой скорости привода имеют периодический характер. Передаточные отношения конкретных звеньев редуктора известны, что дает возможность абсолютно точно рассчитать эти периоды. Основная синусоида имеет период около 6 минут, соответствующий одному обороту червяка. (Использовать "минуты" можно только для первоначальных, приблизительных оценок. Точные расчеты велись в "оборотах ротора" электродвигателя или в тактах питающего его переменного напряжения). На низкочастотные колебания "накладываются" более высокочастотные (с периодом в 6.67 раз меньшим), возникающие в предыдущем звене редуктора.
Характер изменения угловой скорости и знание периодов ошибок позволили реализовать идею "корректора периодической ошибки". Для того чтобы скомпенсировать обе периодические ошибки, требуется рассчитать наименьший период, после которого значения ошибок повторяются. Он составляет чуть более 18 минут. За это время червяк сделает 3 полных оборота, а предыдущее звено редуктора — 20 оборотов. Таким образом, достаточно задать необходимые значения скорости привода на этом промежутке, и мы сможем скомпенсировать колебания скорости гидирования на протяжении и намного более длительной экспозиции.
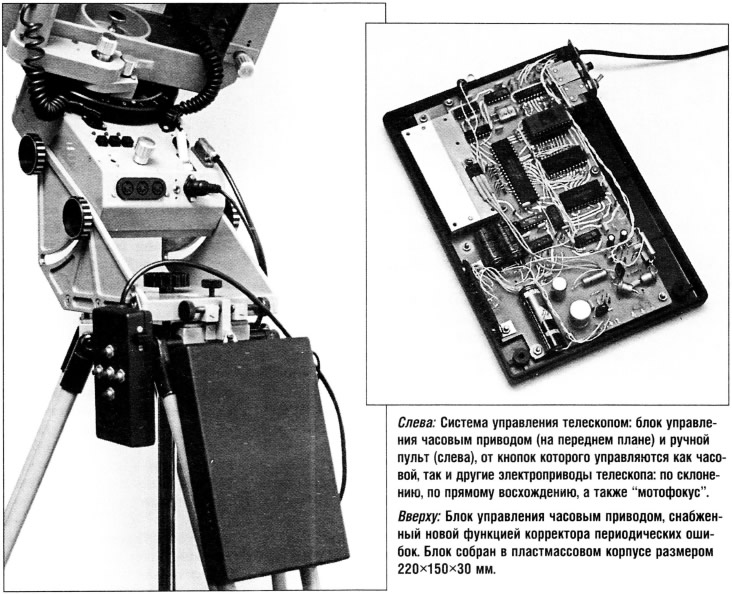
"Корректор" — не устройство, а лишь функция нового блока управления часовым приводом, изготовленного взамен прежнего, который питал двигатель стабилизированной частотой и допускал лишь ее ручное изменение, т.е. коррекцию хода.
Новый блок представляет собой электронное устройство, собранное на основе микропроцессора типа Z80, меняющее по заданной программе частоту сигнала, подаваемого на двигатель.
Устройство имеет два основных режима работы: рабочий режим и режим обучения. В рабочем режиме оно оказывается сразу после включения питания. Если ОЗУ компьютера не содержит программы, то туда автоматически записывается программа равномерного вращения с номинальной скоростью или "нуль-программа". Номинальной может быть либо "звездная", либо "лунная" угловая скорость вращения вала полярной оси — выбор производится переключателем. Кнопки "+" и "-" изменяют эту скорость вращения на ±40%.
В режиме обучения в ОЗУ формируется программа, задающая небольшие изменения частоты вращения вала двигателя, компенсирующие ошибки кинематики. Процесс обучения внешне выглядит как обычное гидирование с визуальным контролем по ведущей звезде и нажатием кнопок коррекции. Но при этом все изменения скорости не только выдаются на двигатель, но и запоминаются, составляя содержание программы. Ее максимальная емкость — 972 переключения скорости.
Штатный выход из режима происходит только автоматически и только по завершении одного периода 18-минутной совокупной кинематической ошибки. При этом программа сохраняется в памяти, а момент завершения обучения сопровождается коротким звуковым сигналом. Система возвращается в рабочий режим и начинает автоматическое повторение проведенных ранее коррекций. Сами кнопки "+" и после "обучения" обеспечивают ±40% изменения скорости выполнения программы. Циклическое исполнение программы продолжается период за периодом — до выключения устройства. После повторного включения цикл продолжится с этого же места.
Процесс обучения нельзя прерывать. Любая неполная или поврежденная программа не может быть синхронизирована с кинематикой привода — такая программа автоматически стирается и заменяется "нуль-программой". Сбивают синхронизацию также размыкание зубчатых звеньев редуктора, ручное вращение шестерен и прочее. В этих случаях корректор придется заново "обучить". При выключенном внешнем питании (12 В) сохранение программы обеспечивается небольшим встроенным аккумулятором. В случае его разряда об утере программы просигнализирует звуковая и светодиодная индикация. Светодиоды используются и во вспомогательных тестовых режимах.
Первые же испытания "корректора периодической ошибки" в составе телескопа показали значительное, в несколько раз, улучшение равномерности хода. Конечно, абсолютно точного удержания звезды на перекрестии добиться таким способом невозможно. Остаются неисправленными ошибки с другими, не учтенными периодами, но вред от них, к счастью, невелик. Наконец, существуют внешние, не поддающиеся программированию помехи: вибрации монтировки, дрожание воздуха, атмосферная рефракция и другое. Для радикальной борьбы с такими явлениями нужна иная стратегия, основанная на применении следящих систем. Но это уже другая тема.
